目次 – Chapter 2 空間的ムーブメント
訳注
• 補足が必要な専門用語は《 》で簡潔に説明しています。
2.1 総論
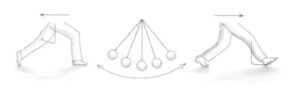
本章では、身体の重心(centre of gravity)の移動を扱います。重心は
• 水平方向(前進・後退・斜め・横)
• 垂直方向(上方・下方)
の 2 ベクトルで動きます。まず空間移動の基本原則を示し、続いてスウィング系種目における典型的なスウィング・ユニットの構造を解説します。その後、クイックステップのジャンプ要素、ライン・フィガー、その他の非スウィング系ムーブメントについて述べます。
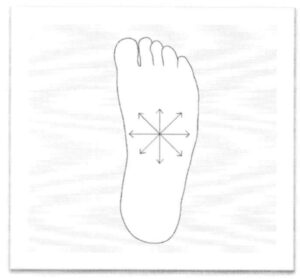
2.1.1 移動方向(Spatial Directions)
重心と足は床に対して 8 つの水平方向へ動きます。原著は壁(Wall)とセンター(Centre)を基準に、下表 38 を例示しています。
| No | 方向 | 説明 |
|---|---|---|
| 1 | LOD | 壁と平行に進行 |
| 2 | Diag. to Wall | 壁へ斜め前進 |
| 3 | to Wall | 壁へ直角(横移動) |
| 4 | Diag. to Wall against LOD | 壁へ斜め後退 |
| 5 | against LOD | LOD 逆方向に後退 |
| 6 | Diag. to Centre against LOD | センターへ斜め後退 |
| 7 | to Centre | センターへ直角(横移動) |
| 8 | Diag. to Centre | センターへ斜め前進 |
複合動作では方向・回転・スウェイが層状に重なります。例:ワルツのナチュラルターン 1-3 歩では、
① 男性=斜め壁へ前進/女性=斜め壁へ後退 → ② トップライン右回転で足は横 → ③ 回転に伴いスウェイ発生、という三層構造になります。
2.1.2 スウィング種目に共通するステップの特徴
2.1.2.1 空間移動の開始
ムーブメントは 支持脚の足内で重心がスライドした瞬間に始まります。
身体の一部を動かすときは他部位でバランスを取り、重心が足縁に逃げないよう次の一歩へとつなげます。
2.1.2.2 重心の受け渡し
推進脚《moving leg》が伸び続け、次の一歩で体重を受け取る準備をします。例外は減速・急転回・チェック動作などで、重心が両足間に残る場合です。
2.1.2.3 その他の特徴
- スウィング角とボディ・シェイプが方向転換に影響
- ステップ長は音価と床摩擦で調整
- 回転中はトルソの抗力が安定を助ける《回転を伴うムーブメント中、胴体(torso)が “わずかに回転に遅れて付いて来る” ように使うことで生まれる 慣性抵抗》
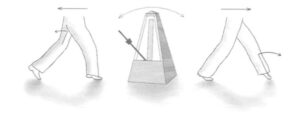
2.2 スウィング・ユニット内の空間移動
| フェーズ | 概要 | 主なキーポイント |
|---|---|---|
| 2.2.1 Preparation Step | 上体を保ったまま支持脚で軽く押し出す | 体重100%支持脚/動脚は床面すれすれ |
| 2.2.2 Lowering Phase | ニー・フレクションで下げる | a) Closed FP から b) Open FP から c) 下降終了 |
| 2.2.3 Drive Step | 最大推進区間 | 動脚アクション/重心転送/終了 |
| 2.2.4 Rising Phase | 足首→膝→ヒップ順に伸展 | 「ヒール→ボール→トウ」のロールアップ |
| 2.2.5 Completion | 高さピークで次ユニットへ | 両膝と足首を“ソフト”に保つ |
2.3 種目別のスウィング・ユニットの違い
- ワルツ : 明確な「1-3」の呼吸と円弧軌道
- タンゴ : スウィング極小、平面移動主体
- スロー・フォックストロット : 長いドライブと緩やかなライズ
- クイックステップ : 短いユニットを高速連結し、ライズ頂点で軽い跳躍
2.4 スウィング種目における非スウィング系ムーブメント
2.4.1 ジャンプ要素(Quickstep)
Step Hop / Chassé / Run などを「Slow-a」「Q&Q&」「QQ」カウントで使い分けます。ジャンプ高は速度・リズムで変化し、異なる高さを連結する際は推進と着地のスムーズさが必須です。空中では足首伸展、着地はボール→ヒール。ホールドは衝撃に備え上体と腕のトーンを増やします。
2.4.2 同一レベルを保つフィガー
ピクチャー・ステップ等。膝屈伸を抑え水平スライドを強調します。
2.4.3 ライン・フィガー
上体と脚線を大きく伸ばし、空間に「線」を描くポーズ。
2.4.4 その他のムーブメント
- Developpé / Kick : 脚を描き上げる開脚動作
- Leg Hook : 片脚を相手脚に掛ける装飾的動き
- Rondé : 床を円弧でスウィープ
まとめ
第 2 章「空間的ムーブメント」は、重心移動の方向・タイミング・高さを体系化し、各種目に共通/固有の運動原理を示しています。実践では:
- 方向認識(8方向)とスウィング・ユニットの分解
- 重心→足部→ボディラインの一貫性
- 種目特性に応じたライズ&フォール/ジャンプ高のコントロール
これらを意識することで、より滑らかで立体的なダンス表現が可能になります。
\ 最新情報をチェック /